树莓派 Pico有26个GPIO引脚,其中大部分都是通用输入输出引脚(GPIO),这些引脚可以配置为输入或输出模式:
输出模式:可输出高电平(3.3v)或低电平(0v)
输入模式:可读取外部信号的高低电平
让我们从最基础的输出例子开始:使用输出电压来控制一颗 LED亮灭。
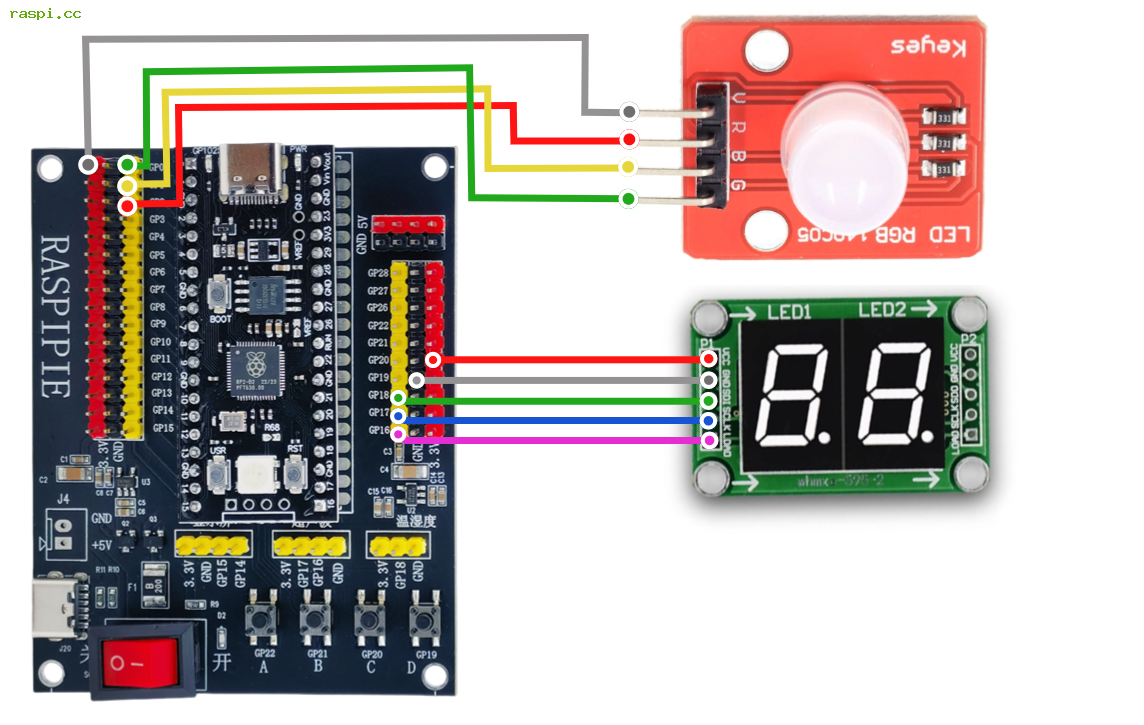
接线方式:LED 的正极(长脚)连接到 GP0,LED 的负极(短脚)连接到 GND

from machine import Pin
import time
# 初始化GP0为输出模式
led = Pin(0, Pin.OUT)
while True:
led.value(1) # 输出高电平,点亮LED
time.sleep(1) # 延迟1秒
led.value(0) # 输出低电平,熄灭LED
time.sleep(1) # 延迟1秒
代码说明:
首先导入必要的模块:Pin 用于引脚控制,time 用于延时
创建 Pin 对象,指定引脚号(GP0)和模式(输出)
在无限循环中:
使用 value(1) 使引脚输出高电平,点亮 LED
延时 1 秒
使用 value(0) 使引脚输出低电平,熄灭 LED
再延时 1 秒
接下来我们学习如何读取数字输入,以读取A按键(GP22)输入为例,当按下时输入信号显示按键成功!

from machine import Pin
import time
# 初始化GP22为输入模式,并启用内部上拉电阻
# 这样未按下时为高电平(1),按下时为低电平(0)
button_pin = Pin(22, Pin.IN, Pin.PULL_UP)
# 用于记录按键状态,避免重复触发
last_state = 1
debounce_time = 0.05 # 50ms防抖时间
print("等待按键触发...")
while True:
# 读取当前引脚状态
current_state = button_pin.value()
# 检测到从高电平变为低电平(按键按下)
if current_state == 0 and last_state == 1:
print("按键成功")
# 短暂延时防抖
time.sleep(debounce_time)
# 更新上一次状态
last_state = current_state
# 短暂延时,降低CPU占用
time.sleep(0.01)
显示效果:

代码说明:
引脚初始化:
我们将 GP22 配置为输入模式 Pin.IN
使用 Pin.PULL_UP 启用内部上拉电阻,这样在没有外部信号时,引脚会保持高电平
防抖处理:
加入了 50ms 的防抖时间 debounce_time,避免机械按键的抖动导致误触发
通过比较当前状态和上一次状态,只在状态变化时响应
检测逻辑:
当引脚从高电平 (1) 变为低电平 (0) 时,判定为按键按下
此时在终端打印 "按键成功" 的消息
低功耗考虑:
循环中加入了 10ms 的短暂延时,既保证了响应速度,又不会过度占用 CPU
你可以通过 Thonny IDE 运行这个程序,并在 Shell 窗口中看到 "按键成功" 的提示信息。如果需要,还可以在此基础上添加 LED 指示功能,让按键成功时 LED 点亮。